analytic running power-speed model, revisted
In a previous post in April 2010, I made an effort to model running power. I recently realized in looking back on this (actually, in reflecting on a comment in Runner's World on the claimed difference between running on the road versus a treadmill) that I'd made an error in doing so in neglecting foot kinetic energy. I admit it's embarrassing when I do calculations on things and post them here then much later realize I'd made such a glaring error. If I were to spend train commuting time doing Sudoku instead my errors would be more private.
In any case, the model I used was the following. I considered running in the inertial frame of the runner. In the absence of wind, this is a valid frame of reference. First I considered the trajectory of the center of mass when the runner is ballistic, which results in the following relation between potential energy change (ΔU) and time from launch to apogee (t):
ΔU = ½ M g² t²,where M is total mass.
I then assumed the body center-of-mass spends a fraction of total time α following a ballistic trajectory (neither foot supporting a substantial fraction of body weight), and of this time one quarter is spent each upward trajectory (up left, down left, up right, down right each taking equal time). I can then calculate this time in terms oc cadence C, the number of steps of each foot per unit time:
t = α / (4 C ).
Assuming the power to raise the center of mass through potential difference ΔU comes from the muscles, and this must then be done twice per foot-stride:
Pcom = C M g² t²
= C M g² α² / ( 4 C )²
= M g² α² / 16 C.
On top of this there is an energy cost of raising and lowering the feet. Even if I was hanging in space, suspended by a harness, doing the running motion with my legs would take metabolic energy. On a bike the two feet are coupled together by the pedals and crank arms, so when one leg drops it raises the other, but in running the legs are essentially independent, so each leg must be raised independent of the other. My initial calculation assumed the full energy must be provided to raise the foot from its resting position on the ground to the full height mid-stride, but since then I found a reference by MR Shorten which claims shoes can retain and return a certain amount of elastic energy (10 Joules in the reference). So I assume here that not all of the energy required comes from the leg muscles, but rather some (Eshoe) comes from the expansion of the shoe sole, proportional to twice the cadence (once for each side of the body per step):
Pfeet = 2 C [ Mfoot g hfoot − Eshoe ].
The term on the left is the energy cost of raising the foot (effective mass Mfoot to a height hfoot, and the term on the right is the elastic energy stored in the shoe which need not be provided by muscles. The "2 C" term is twice the net run cadence, one per foot per left+right stride, to convert energy into power.
The "effective" mass of the foot is the mass of the foot itself plus a pro-rated contribution from the leg. If I model the leg and foot as a rigid body pivoting around an axis, then the contribution to potential energy is proportional to the distance of a point from the pivot. So mass at the foot would count maximally, and mass closer to the pivot point (for example, hip joint or knee joint) would be rated proportionally to how far that point is from the pivot relative to the foot.
Back in 2010, I laid down with my knee on the ground and my foot on the scale and got 6.8 kg. My shoes are around 200 grams with socks so adding that per foot yields Mfoot = 7.0 kg. Note by laying my foot on the scale this creates a pivot point at my knee (which was resting on the ground). When a runner kicks, there is pivoting around the hip, but additionally a pivoting at the knee, so the maximal action is below the knee where these two motions are superposed. This approach assumed that weighing my foot with the knee on the ground counts only the weight below the knee, and that the portion above the knee doesn't contribute significantly. I revisit this measurement approach in a bit.
This is basically where my analysis ended back in 2010. But what this neglects is when a runner kicks, there is more than a potential energy component: there is additionally a kinetic energy component. Relative to the road, the foot goes from a state of rest to a state of rapid forward motion. The foot comes off and needs to be accelerated forward, either by pushing off on the road, or by actively pivoting it at the hip and/or knee. The center of mass is moving forward, but the foot needs to move ahead faster to pass the center of mass and reach a forward position for the landing.
Chi Running talks about lifting the foot from behind and placing it under the body in the forward range of motion. But this violates basic physics: the average foot position needs to be exactly under the center of mass to avoid toppling over (on level ground, neglecting relative wind). If the average foot position was behind the center of mass, the runner would topple over forward. So the run stride needs to move the foot from behind the center of mass to ahead of it. This diagram associated with the Pose Method shows this well:
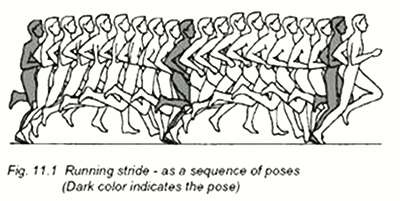
The center of mass is moving forward with speed v and this is associated with a relatively constant kinetic energy ½ M v². Maintaining a constant kinetic energy takes in principle no power: objects at motion tend to remain in motion. In addition to this center of mass motion, the feet are moving back and forth. The feet move forward when they kick forward, then they plant on the ground and are carried backward. I already asserted that it takes energy to kick the foot up to its point of maximal height. The question is how much additional energy is required to accelerate the foot forward when it leaves the ground, and if any of this energy is preserved when the foot lands.
The runner is essentially ballistic a fraction of time α, and therefore one of the two feet is firmly on the ground a fraction 1 − α. This implies each foot is on the ground (assuming at most one foot is on the ground) a fraction (1 − α)/2. Each foot is stationary a fraction of time (1 − α)/2 and is therefore moving forward a fraction (1 + α)/2. To maintain an average speed equal to the runner speed v, each foot must average a forward speed 2 v / (1 + α) when it is non-stationary. The peak kinetic energy of the foot is then 2 Mk,foot v² / (1 + α)² .
I'll assume kinetic the energy is lost on landing. There's vertical kinetic energy, coming from the foot falling from peak height and which I already counted, but also this forward kinetic energy, which I have not.
Pk,feet = 4 C Mk,foot v² / (1 + α)²
I can sum up these components:
P = M g² α² / 16 C +
[ 2 ( Mfoot g hfoot − Eshoe ) + 4 Mk,foot v² / (1 + α)² ] C
So before I had no explicit dependence on the speed, but now I do: there is a kinetic component which is lost when the foot lands. Now there is a component proportional to the square of speed. So with this model power is not proportional to speed: running in place at zero speed has a non-zero power, then moving forward (or, in theory, backward) adds a component of power proportional to the square of speed.
Before I proceed further I need to estimate α, the fraction of time the runner is ballistic. It stands to reason the faster the runner is going at a given cadence, the higher the value of α. The distance covered by the runner each step is v / (2 C). But the amount the body can move with the foot on the ground is limited by flexibility. Suppose the foot can remain on the ground for distance Lstep. Then
α = 1 − 2 C Lstep / v.I estimated my Lstep = 50 cm.
This allows me to eliminate α as follows:
α² = (1 − 2 C Lstep / v)²,yielding:
(1 + α)² = 4 (1 − C Lstep / v)²,
P = M g² (1 − 2 C Lstep / v)² / 16 C +
[ 2 ( Mfoot g hfoot − Eshoe ) + Mk,foot v²/ (1 − C Lstep / v)² ] C.
I am around 500 grams (maybe up to 1 kg) heavier this year than in 2010 (at least 2 kg lighter now then at Diablo this year, though). I'll use 58.5 kg for the runner with clothing (what I was wearing @ CIM). Other parameter estimates were: Mfoot = 7.1 kg, α = 0.7, Eshoe = 10 Joules, h = 70 cm (based ont he POSE image and my shin length of 50 cm), and running at a 3:16 marathon pace (3.59 meters/sec).
I was a bit suspicious of that foot mass measurement. I remeasured it and, with help to read the scale, got 6.2 kg. This is still in the same ballpark range, but I'm not sure I'm able to reliably isolate weight above the knee from the measurement. So I looked for an on-line reference, and found this:
The lower limb is 15.7% of total
body weight subdivided as: thigh: 63% of this 15.7% shank: 27.9% of this 15.7% foot: 8.93% of this 15.7%
So from this, I get that the foot is 1.40% of body mass, and the shin is 4.38%. If I model the foot as a point-mass at the end of the shin, which has uniformly distributed mass, then the potential-equivalent mass for the system is 3.59% total mass, while the kinetic-equivalent mass is 2.86%. (the difference is whether mass along the shin contributes proportional to distance or proportional to distance-squared from the knee joint). If I assume a naked body mass of 57.5 kg this yields 2.07 kg for potential and 1.66 kg for kinetic. To each of these gets added the mass of the shoes (232 grams), yielding 2.30 kg and 1.89 kg. I'm assuming here, arbitrarily, any motion above the knee is a lossless pendulum. This is substantially below the amount I had measured with the scale.
I'll assume running with a cadence of 90/min (90 steps with each foot per minute, or 1.5/second). From this I can go back to my formula for α = 1 − 2 C Lstep / v. I consider only values of C for which α is positive (I'm modeling running, not walking).

Power calculated for fixed cadence of 1.5/sec (90/min)
While the result doesn't yield a speed-independent rate of work per unit distance, for 3.5 meters/second (3:15 marathon pace) it does yield excellent agreement with Minetti's 3.4 kJ/kg/km metabolic cost if I assume a 22% metabolic efficiency, which is in the range of typical reported values. So it seems to be on target here.
But it fails another test. I added 100 grams to each foot and checked the effect of this on per-unit-distance work. The result was an increase from 0.733 to 0.758 kJ/kg/km, an increase of 3.4%. This is not in good agreement with the reported value of 1%.
So in summary my previous calculation counted two potential energy components of a stride: raising center-of-mass, and raising the foot. It assumes the center-of-mass can move forward a fixed distance each stride, and is ballistic the remaining distance. It assume all of this potential energy is lost when the foot strikes the ground. I added in energy storage in the shoe, and kinetic energy in the foot and shin when the foot is kicked forward. After revising my foot + shin mass estimate based on claimed values from the web, I get a speed-dependent power with a per-unit rate of work compatible with Minetti's treadmill measurements of metabolic work, but which predict a greater dependence on shoe mass than has been reported.



Comments